PACER+: On-Demand Pedestrian Animation Controller in Driving Scenarios
|
1.Shanghai AI LAB
|
2.CMU
|
3.Nvidia
|
4.CUHK
|
|
* donates equal contribution. Any questions are welcome to email Jingbo Wang: wangjingbo1219@gmail.com
|
News
[news] The paper is accepted by CVPR 2024. We release codes and pre-trained models in our PacerPlus .
|
|
We address the challenge of content diversity and controllability in pedestrian simulation for driving scenarios.
Recent pedestrian animation frameworks have a significant limitation wherein they primarily focus on either following
trajectory [46] or the content of the reference video [57], consequently overlooking the potential diversity of human
motion within such scenarios. This limitation restricts the ability to generate pedestrian behaviors that exhibit a wider
range of variations and realistic motions and therefore restricts its usage to provide rich motion content for other
components in the driving simulation system, e.g., suddenly changed motion to which the autonomous vehicle should
respond. In our approach, we strive to surpass the limitation by showcasing diverse human motions obtained from
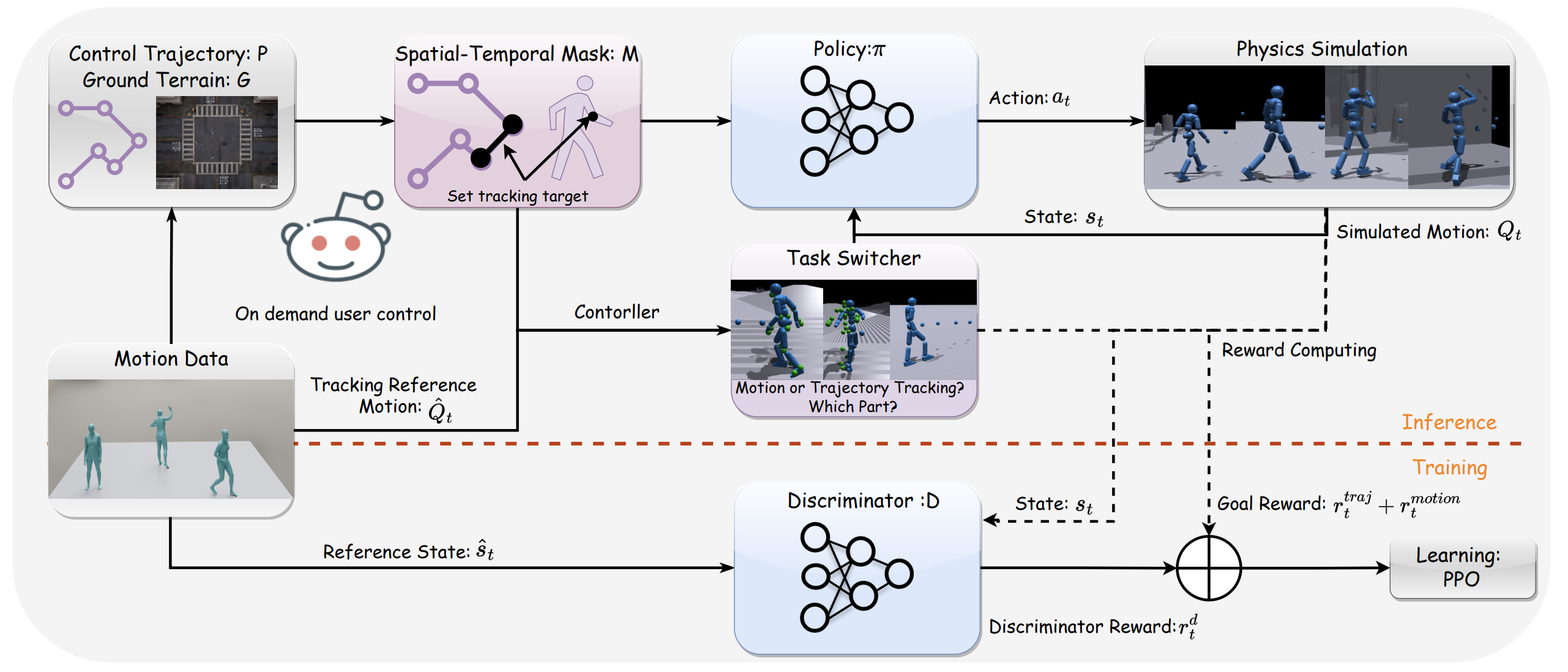
various sources, such as generated human motions, in addition to following the given trajectory. The fundamental
contribution of our framework lies in combining the motion tracking task with trajectory following, which enables the
tracking of specific motion parts (e.g., upper body) while simultaneously following the given trajectory by a single
policy. This way, we significantly enhance both the diversity of simulated human motion within the given scenario
and the controllability of the content, including languagebased control. Our framework facilitates the generation of
a wide range of human motions, contributing to greater realism and adaptability in pedestrian simulations for driving
scenarios
